
Mediante el modelo estándar de ciclo de vida de Software CRISP-DM, se podría construir valor para pacientes con parálisis cerebral, su entorno familiar y los profesionales (por ejemplo, sanitarios) que tratan a estos pacientes mediante la estimación de la pose para evaluar el éxito de los tratamientos o terapias que pueden recibir estos pacientes.
¿Cómo se puede estudiar la eficacia de un tratamiento para reducir los movimientos distónicos de pacientes con parálisis cerebral?

Alumna de la 3ª edición del Máster en Big Data Sanitario y Médico Residente en Farmacología Clínica Hospital Universitario La Paz, Madrid (España)
A continuación, se describen las historias agile a acometer en primera iteración:
Tecnologías de Estimación de la Pose que existen y medios que necesitan
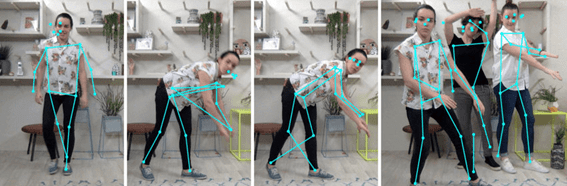
La familia de algoritmos pre-entrenados de Estimación de la Pose consiste en un conjunto de técnicas de visión por ordenador para detectar figuras humanas en imágenes y videos y mostrar sus articulaciones clave. El resultado final es una representación de las articulaciones y puntos clave para detectar la posición. Los modelos de estimación de pose toman una imagen de cámara procesada como entrada y salida de información sobre puntos clave. A los puntos clave detectados se les otorga una puntuación de confianza entre 0,0 y 1,0, la cual indica la probabilidad de que exista un punto clave en esa posición, pudiendo proporcionar información precisa sobre el movimiento y la posición de una figura humana.
Estos modelos de Deep Learning (un tipo de Machine Learning) son gratuitos, de uso simple y diseñados para sacar fácilmente valor de ellos. Los algoritmos han sido previamente entrenados con grandes cantidades de datos y su arquitectura ya está establecida, siendo funcionales en cuanto se crean (plug-and-play).
Para poder adaptar y configurar estos algoritmos a la aplicación de interés hay que tener en cuenta el número de personas que se desea detectar, el tipo de entrada, el número de cámaras que graban la misma escena, si se desea aplicar a una imagen estática o a un video, si se desea un modelo en 2D o en 3D y el modelo corporal necesario según el número de articulaciones detectadas.
La familia de algoritmos pre-entrenados de Estimación de la Pose consiste en un conjunto de técnicas de visión por ordenador para detectar figuras humanas en imágenes y videos y mostrar sus articulaciones clave
La Estimación de la Pose Multipersona o Multi-person Pose Estimation (MPE) captura las poses de muchas personas simultáneamente. Los métodos MPE se pueden dividir en:
- Basados en aprendizaje profundo (Deep Learning) vs basados en modelos. La diferencia entre los métodos basados en aprendizaje profundo y los basados en modelos es si definimos un modelo explícito hecho a mano para estimar las poses humanas o no. Los métodos MPE basados en Deep Learning se pueden clasificar en dos tipos:
- De una etapa. Se incluyen los métodos basados en cuadro delimitador, los basados en la incrustación y los basados en compensaciones.
- De dos etapas, que incluyen enfoques:
- De arriba hacia abajo (top-down). Incluyen dos pasos, la detección de personas y la estimación de la posición de una sola persona. Se procede en primer lugar a la detección del cuerpo humano en su conjunto, y posteriormente se determina su estructura interna. Algunas de las subcategorías son los métodos basados en coordenadas y los basados en mapas calientes
- De abajo hacia arriba (bottom-up). Predicen primero las coordenadas de todas las articulaciones (puntos clave) a la vez y luego usan el método de coincidencia de gráfico bipartito para asignar estas coordenadas a cada instancia de una persona, es decir, en base a los puntos clave se crea un grafo con la estructura del cuerpo. Dos de los algoritmos bottom-up más utilizados son:
- OpenPose: utiliza una red neuronal convolucional VGG19 (visual geometry group). Este modelo de MPE recibe imágenes RGB (red, green, blue). Pueden ser fotografías o imágenes en movimiento, de diversas calidades y formatos, con al menos una persona en la imagen (puede capturar las poses de varias personas simultáneamente). Los algoritmos devuelven un mapa de calor de las articulaciones del cuerpo, donde es probable que estén las articulaciones en la imagen. Cada articulación tiene asociada una confianza. Si la fotografía es clara, con buena visibilidad del cuerpo y de la articulación, la confianza es grande. Y, al contrario, si la articulación se ve mal, la confianza será pequeña
- Simple Pose: utiliza una arquitectura de relojes de arena apilados (stocked hourglasses). Se basa en la mezcla de información semántica y geométrica a diferentes niveles. Está formada por una sucesión de bloques, cada uno de los cuales cuenta con su propio reloj de arena. Cada reloj de arena es una red convolucional. En la primera parte, la imagen de entrada experimenta una reducción progresiva de resolución. En la segunda parte sucede exactamente lo contrario, siendo la estructura de la red completamente simétrica.
Ejemplos de bibliotecas de aprendizaje automático de código abierto donde se pueden encontrar modelos para la Estimación de la Pose son Tensorflow, Pytorch o Keras.
Una implementación de referencia de modelo de Estimación de la Pose de TensorFlow es MoveNet, un modelo ultrarrápido y preciso que detecta 17 puntos significativos de un cuerpo. Para entrada de video (secuencia de imágenes), se debe aplicar el recorte inteligente basado en detecciones del fotograma anterior cuando la entrada es una secuencia de fotogramas. Así el modelo dedica su atención y recursos al tema principal, lo que se traduce en una calidad de predicción mejor. Se podría usar este modelo de estimación de la pose para estudiar la eficacia de un tratamiento para reducir los movimientos distónicos de pacientes con parálisis cerebral.
En definitiva, existen muchas maneras de estimar la pose, entre las cuales se encuentran métodos de modelado geométrico, de mapeado visual, algoritmos basados en patrones, algoritmos probabilísticos, sistemas pasivos, sistemas activos con sensores remotos, etc. Según el tipo de proyecto, se debe escoger el más adecuado.
Una implementación de referencia de modelo de Estimación de la Pose de TensorFlow es MoveNet, un modelo ultrarrápido y preciso que detecta 17 puntos significativos de un cuerpo
Fuentes de datos que puedan servir para la prueba de concepto (entendimiento de los datos o Data Understanding)
- Videos de YouTube o de repositorios digitales públicos en la web donde aparezcan una o varias personas con parálisis cerebral realizando movimientos en diversos contextos, como por ejemplo videos de niños con esta patología (Infant movement videos, IMV). Se podrían obtener realizando un scrapeado en varias páginas web.
- Histórico de pacientes con parálisis cerebral, dichos datos se podrían extraer de historias clínicas electrónicas de centros sanitarios o de registros de centros ocupacionales, Centros de Día, residencias o asociaciones de pacientes con parálisis cerebral.
- Registro de pacientes con parálisis cerebral que reciben el tratamiento cuya eficacia se desea estudiar (farmacológico ─como relajantes musculares o toxina botulínica─, fisioterapia y masoterapia, terapia ocupacional, ejercicios motores, práctica de deporte adaptado, cirugía, etc.), con datos procedentes de historias clínicas electrónicas de centros sanitarios o de fichas o registros de residencias, de Centros de Día o de centros de rehabilitación
- Estadísticas de número y tipos de eventos que han ocurrido durante el tratamiento. Estos datos podrían proceder de estudios realizados en el ámbito clínico asistencial o de historias clínicas electrónicas de centros sanitarios.
Tras determinar qué datos son necesarios y recolectarlos, habría que proceder a explorarlos (determinar los diversos tipos, la distribución de los mismos y los patrones que siguen) y verificar la calidad de los mismos para comprobar que tengan validez, ya que son precisos datos de calidad para obtener buenas conclusiones (siguiendo la regla mnemotécnica GIGO: Gold In, Gold Out; Garbage In, Garbage Out).
Posteriormente, ya en la fase de preparación de los datos (Data Preparation), habría que tratar los datos de entrada del modelo. Para ello, podría ser necesario transformar, normalizar y agregar variables, mediante la limpieza (borrado de datos que no concuerden), la generación de nuevos atributos para analizar (Feature Engineering) mediante la transformación de variables, agrupaciones de valores, varios tipos de codificación, reducción de la dimensionalidad, etc.), así como la integración de datos de distintas procedencias que configuran un mismo punto de análisis.
Cómo se puede medir el éxito de la prueba de concepto
- Medir la frecuencia, la amplitud, la duración, la velocidad y la fuerza de los movimientos distónicos involuntarios y comparar el antes y el después del tratamiento o tratamientos.
- Determinar las partes del cuerpo/segmentos del eje corporal implicados en los movimientos distónicos involuntarios y comparar el antes y el después del tratamiento o tratamientos.
- Determinar la trayectoria, la orientación o direccionalidad de los movimientos distónicos involuntarios y comparar el antes y el después del tratamiento o tratamientos.
En definitiva, se trataría de realizar una evaluación del cambio en los movimientos distónicos mediante la comparación de un mismo individuo con parálisis cerebral a lo largo del tiempo, antes y después del tratamiento.
En la fase de modelado (Modelling) se podría contestar a la pregunta inicial gracias al modelado mediante la aplicación de algoritmos de aprendizaje automático, así como la aplicación de algoritmos estadísticos que den respuesta a la pregunta mediante el análisis de los datos obtenidos y preparados en las fases anteriores. En esta fase se observaría qué pacientes responden mejor o más rápido a un determinado tratamiento o ejercicio motor, o bien si la combinación de terapias (como, por ejemplo, ejercicios y deporte adaptado) es más efectiva (en caso de observarse, por ejemplo, una reducción de la frecuencia, amplitud y duración de los movimientos distónicos y de los segmentos corporales implicados en dichos movimientos en los pacientes con parálisis cerebral).
Posteriormente, en la fase de evaluación (Evaluation), se valoraría la veracidad de las conclusiones obtenidas en la fase de modelado, evaluando si se ha contado con los datos suficientes para extraer conclusiones fiables, repasando el/los modelo/s usado/s y comprobando que el resultado obtenido es correcto y que no se ha dejado nada sin tener en cuenta.
Finalmente, en la fase de lanzamiento (Deployment), el algoritmo se haría accesible a los clientes, cumpliendo con los criterios de disponibilidad y calidad a considerar por la empresa.